填空题
可以证明,矩阵位移法中的坐标转换矩阵[T]6×6是一个正交矩阵,其逆矩阵等于其矩阵
填空题答案仅供参考
题目答案
转置
您的答案
答案解析
暂无解析
可以证明,矩阵位移法中的坐标转换矩阵[T]6×6是一个正交矩阵,其逆矩阵等于其矩阵
在阻尼振动中,共振区内动荷载主要由力与其平衡。
图示体系,若增加EI2的值,则自振频率ω。
在稳定问题的小挠度理论中,体系的平衡状态分为稳定平衡、不稳定平衡与平衡三种情况。
图示等截面梁的极限弯矩Mu已知,则其极限荷载qu等于。

已知l=2m,Mu=300KNm,则图1示等截面静定梁的极限荷载
请绘出图2示结构弯矩图,各杆EI、l均相同。
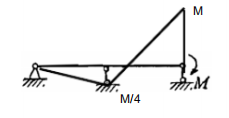
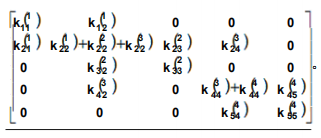
图3示结构的原始刚度矩阵是
略去杆件自重及阻尼影响,图4示结构自振频率是

结构的计算简图应能反映实际结构的主要受力和变形性能,又能使。
三个刚片用三个铰两两相连,且,构成内部不变且无多余约束的体系。
 "]
"] "]
"] "]
"] "]
"]